
agisoft photoscan(实景三维建模软件)官方版
详情介绍
photoscan电脑版全称为agisoft photoscan,它是国内厂商北京中遥智图科技有限公司开发的一款根据数码照片进行建模的软件,软件独特的三维重建技术,可以根据用户添加的多张图片自动生成真实坐标的三维模型,而且不需要设置任何初始值,就可以将2D的图片转换成3D模型。比起以前用3dsmax进行这种全景来说,photoscan无疑是方便许多,整个建模的过程全部都是自动进行的,而且添加不同方位的照片越多建立的模型精度也越高,无论是航拍相片还是数码相机都可以用它进行处理。
同时,photoscan还具备纹理网格模型重建的功能,可以生成高分辨率的地理正交影响,用户只需要简单的控制坐标就可以生成专业级的三维模型。有了它可以说,不管是专业人士还是业余人士都可以在短时间内,从上百张图片中获取测量数据。
处理各类图像:航空(最低点,斜)/近距离。
自动校准:框架(含鱼眼)/球形摄像机。支持多摄像头项目。
2、密集点云生成

精心设计模型以获得准确的结果。
.LAS导出受益于经典的点数据处理工作流程。
3、精细纹理

各种场景:考古遗址、文物、建筑物、内饰、人,等等。
直接上传Verold和Sketchfab资源。纹理:HDR和多文件,超级详细的可视化。
4、全景拼接

三维重建的捕获数据来自同—个相机位置——相机站,提供至少2相机站。
360°全景拼接为一个相机站数据。
2、生成多边形Mesh网模型(普通/彩色纹理)
3、设置坐标系统
4、生成真实坐标的数字高程模型(DEM)
5、生成真实坐标的正射影像
2、tools弹出的窗口点击“preferences”;
3、在photoScan Preferences窗口中,点击“Language”后面的“English”下拉列表选择“Chinaese”;
4、然后的点击“Chnese”,并点击ok选项;
5、此时已经是中文了。
2、合并完成后,会出现 【Merged Chunk】;
3、再选择【工作流程】,下拉菜单找到【批量处理】,如下图,选择【添加】,作业类型选择【对齐照片】,适用于选中【选择】,在下面对话框中,选择刚刚合并的堆块“Merged Chunk”,注意下面的精度选择【低】即可,确认后,空三就开始了。
输出格式包括三维建模常见的格式GeoTiff、xyz、Google KML、COLLADA、VRML、Wavefront OBJ、PLY、3DS Max、Universal 3D、PDF。
高达32 GB的RAM CPU
四核Intel Core i7 CPU,Socket LGA 1150或1155(Kaby Lake,Skylake,Broadwell,Haswell,Ivy Bridge或Sandy Bridge)
主板:任何LGA 1150或1155型号,带4个DDR3插槽和至少1个PCI Express x16插槽
RAM: DDR3-1600,4 x 4 GB(总共16 GB)或4 x 8 GB(总共32 GB)
GPU: Nvidia GeForce GTX 980或GeForce GTX 1080(可选)
高级配置
高达64 GB的RAM CPU
Octa-core或hexa-core Intel Core i7 CPU,Socket LGA 2011-v3或2011(Broadwell-E,Haswell-E,Ivy Bridge-E或Sandy Bridge-E)
主板:任何LGA 2011-v3或2011型号,带有8个DDR4或DDR3插槽和至少1个PCI Express x16插槽
RAM: DDR4-2133或DDR3-1600,8 x 4 GB(总共32 GB)或8 x 8 GB(总共64 GB)
GPU: Nvidia GeForce GTX 980 Ti,GeForce GTX 1080或GeForce TITAN X.
极佳配置
超过64 GB的RAM
对于处理极大数据集,可以使用双插槽Intel Xeon工作站。
同时,photoscan还具备纹理网格模型重建的功能,可以生成高分辨率的地理正交影响,用户只需要简单的控制坐标就可以生成专业级的三维模型。有了它可以说,不管是专业人士还是业余人士都可以在短时间内,从上百张图片中获取测量数据。

软件特色
1、摄影三角测量
处理各类图像:航空(最低点,斜)/近距离。
自动校准:框架(含鱼眼)/球形摄像机。支持多摄像头项目。
2、密集点云生成

精心设计模型以获得准确的结果。
.LAS导出受益于经典的点数据处理工作流程。
3、精细纹理

各种场景:考古遗址、文物、建筑物、内饰、人,等等。
直接上传Verold和Sketchfab资源。纹理:HDR和多文件,超级详细的可视化。
4、全景拼接

三维重建的捕获数据来自同—个相机位置——相机站,提供至少2相机站。
360°全景拼接为一个相机站数据。
软件功能
1、空中三角测量2、生成多边形Mesh网模型(普通/彩色纹理)
3、设置坐标系统
4、生成真实坐标的数字高程模型(DEM)
5、生成真实坐标的正射影像
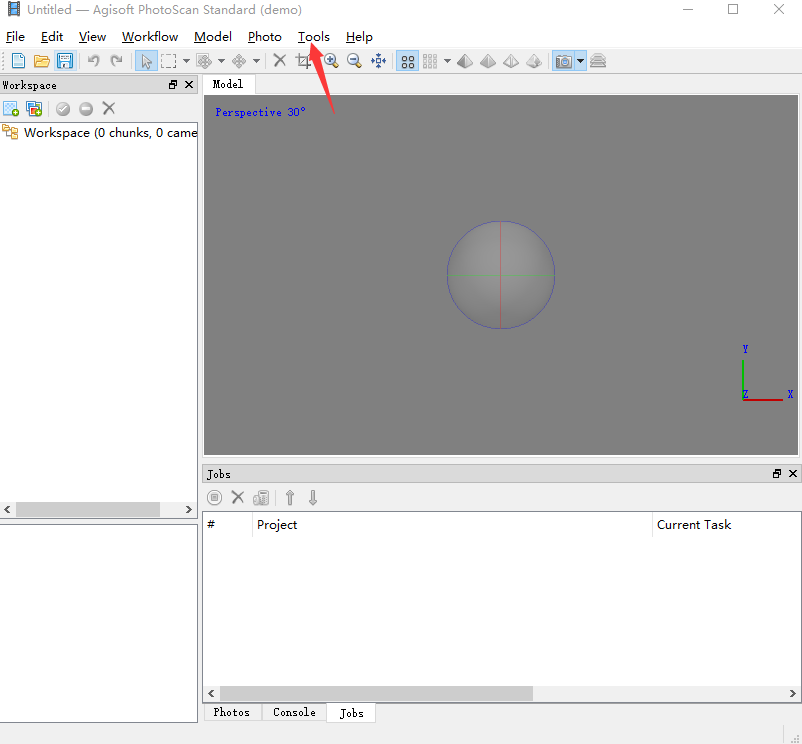
agisoft photoscan官方版怎么设置中文
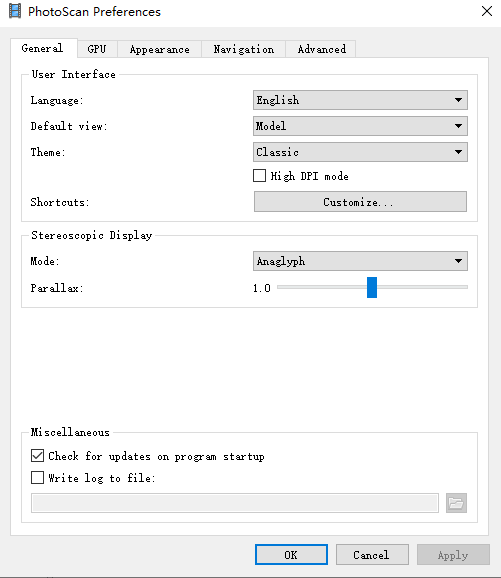
1、在photoScan主界面上点击“tools”;
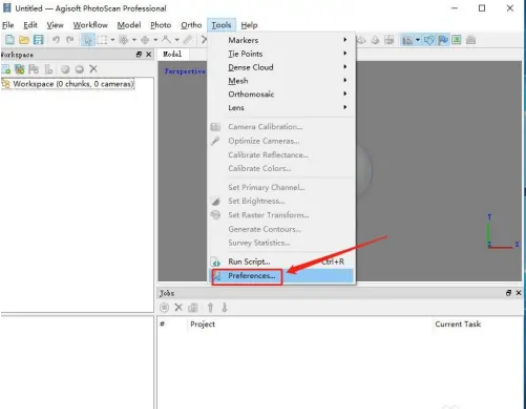
2、tools弹出的窗口点击“preferences”;

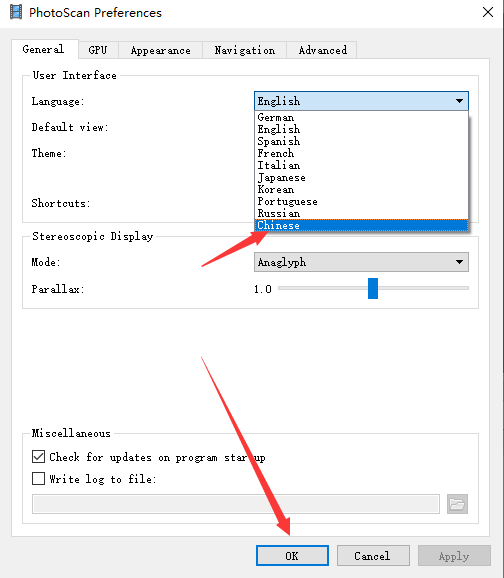
3、在photoScan Preferences窗口中,点击“Language”后面的“English”下拉列表选择“Chinaese”;

4、然后的点击“Chnese”,并点击ok选项;

5、此时已经是中文了。

photoscore合并堆块,设置批量操作流程
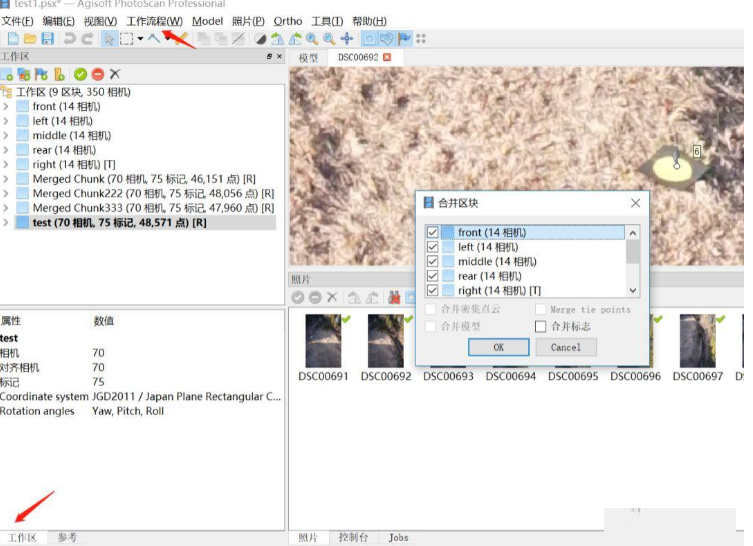
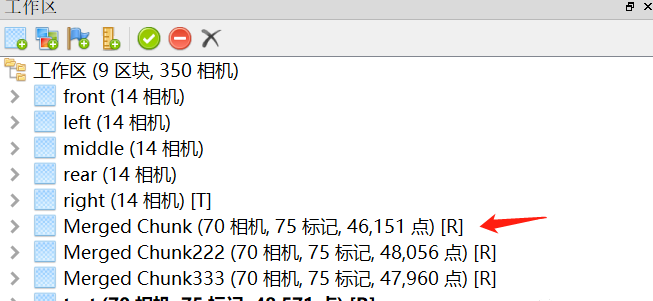
1、点击左下角,【工作区】,点击【工作流程】,在下拉菜单中,选择【合并堆块】,如下图弹出的对话框,选择五镜头项目堆块,right,left,middle,rear和front全部打钩,点击【ok】;
2、合并完成后,会出现 【Merged Chunk】;

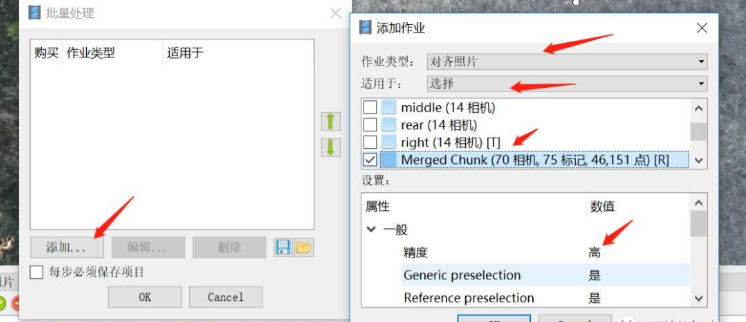
3、再选择【工作流程】,下拉菜单找到【批量处理】,如下图,选择【添加】,作业类型选择【对齐照片】,适用于选中【选择】,在下面对话框中,选择刚刚合并的堆块“Merged Chunk”,注意下面的精度选择【低】即可,确认后,空三就开始了。


photoscore怎么导出
在左上角,选择【文件】然后找到导出,选择【导出相机】,在弹出的对话框中,选择导出格式是【block exchange】。photoscan支持格式:
支持输入格式包括:JEPG、TIFF、PNG、BMP、JEPG Multi-Picture Format(MPO)输出格式包括三维建模常见的格式GeoTiff、xyz、Google KML、COLLADA、VRML、Wavefront OBJ、PLY、3DS Max、Universal 3D、PDF。
系统要求
基本配置高达32 GB的RAM CPU
四核Intel Core i7 CPU,Socket LGA 1150或1155(Kaby Lake,Skylake,Broadwell,Haswell,Ivy Bridge或Sandy Bridge)
主板:任何LGA 1150或1155型号,带4个DDR3插槽和至少1个PCI Express x16插槽
RAM: DDR3-1600,4 x 4 GB(总共16 GB)或4 x 8 GB(总共32 GB)
GPU: Nvidia GeForce GTX 980或GeForce GTX 1080(可选)
高级配置
高达64 GB的RAM CPU
Octa-core或hexa-core Intel Core i7 CPU,Socket LGA 2011-v3或2011(Broadwell-E,Haswell-E,Ivy Bridge-E或Sandy Bridge-E)
主板:任何LGA 2011-v3或2011型号,带有8个DDR4或DDR3插槽和至少1个PCI Express x16插槽
RAM: DDR4-2133或DDR3-1600,8 x 4 GB(总共32 GB)或8 x 8 GB(总共64 GB)
GPU: Nvidia GeForce GTX 980 Ti,GeForce GTX 1080或GeForce TITAN X.
极佳配置
超过64 GB的RAM
对于处理极大数据集,可以使用双插槽Intel Xeon工作站。
同类软件
网友评论
共0条评论(您的评论需要经过审核才能显示)
精彩发现
换一换本类排行
月排行总排行

 赣公网安备 36010602000087号
赣公网安备 36010602000087号